|
Speeduino
|
Loading...
Searching...
No Matches
|
Speeduino
|
Go to the source code of this file.
Macros | |
| #define | VSS_USES_RPM2() (isExternalVssMode(configPage2) && (pinVSS == pinTrigger2) && (!currentStatus.decoder.secondary.isValid())) |
| #define | FLEX_USES_RPM2() ((configPage2.flexEnabled > 0U) && (pinFlex == pinTrigger2) && (!currentStatus.decoder.secondary.isValid())) |
Functions | |
| void | initialiseAll (void) |
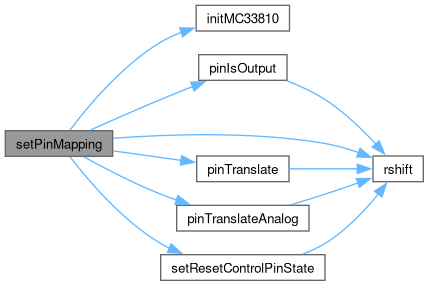
| void | setPinMapping (byte boardID) |
| #define FLEX_USES_RPM2 | ( | ) | ((configPage2.flexEnabled > 0U) && (pinFlex == pinTrigger2) && (!currentStatus.decoder.secondary.isValid())) |
| #define VSS_USES_RPM2 | ( | ) | (isExternalVssMode(configPage2) && (pinVSS == pinTrigger2) && (!currentStatus.decoder.secondary.isValid())) |
Initialise Speeduino for the main loop. Top level init entry point for all initialisations:


Set board / microcontroller specific pin mappings / assignments. The boardID is switch-case compared against raw boardID integers (not enum or defined label, and probably no need for that either) which are originated from tuning SW (e.g. TS) set values and are available in reference/speeduino.ini (See pinLayout, note also that numbering is not contiguous here).