#include "timers.h"
#include "config_pages.h"
#include "statuses.h"
#include "table2d.h"
Go to the source code of this file.
◆ ADCFILTER_BARO_DEFAULT
◆ ADCFILTER_BAT_DEFAULT
◆ ADCFILTER_CLT_DEFAULT
| #define ADCFILTER_CLT_DEFAULT 180U |
◆ ADCFILTER_IAT_DEFAULT
| #define ADCFILTER_IAT_DEFAULT 180U |
◆ ADCFILTER_MAP_DEFAULT
| #define ADCFILTER_MAP_DEFAULT 20U |
◆ ADCFILTER_O2_DEFAULT
◆ ADCFILTER_PSI_DEFAULT
| #define ADCFILTER_PSI_DEFAULT 150U |
◆ ADCFILTER_TPS_DEFAULT
| #define ADCFILTER_TPS_DEFAULT 50U |
◆ BARO_READ_TIMER_BIT
Define the baro sensor read frequency.
◆ BAT_READ_TIMER_BIT
Define the battery sensor read frequency.
◆ BIT_SENSORS_AUX_ENBL
| #define BIT_SENSORS_AUX_ENBL 0 |
◆ BIT_SENSORS_BARO_SAVED
| #define BIT_SENSORS_BARO_SAVED 1 |
◆ BIT_SENSORS_UNUSED2
◆ BIT_SENSORS_UNUSED3
◆ BIT_SENSORS_UNUSED4
◆ BIT_SENSORS_UNUSED5
◆ BIT_SENSORS_UNUSED6
◆ BIT_SENSORS_UNUSED7
◆ CLT_READ_TIMER_BIT
Define the TPS sensor read frequency.
Define the coolant sensor read frequency.
◆ FILTER_FLEX_DEFAULT
◆ IAT_READ_TIMER_BIT
Define the IAT sensor read frequency.
◆ MAP_READ_TIMER_BIT
Define the MAP sensor read frequency.
◆ O2_READ_TIMER_BIT
Define the O2 sensor read frequency.
◆ TPS_READ_FREQUENCY
◆ VSS_GEAR_HYSTERESIS
| #define VSS_GEAR_HYSTERESIS 10U |
◆ VSS_SAMPLES
◆ flexPulse()
◆ getAnalogKnock()
◆ getMAPDelta()
Get the MAP change between the last 2 readings.
◆ getMAPDeltaTime()
Get the time in µS between the last 2 MAP readings.
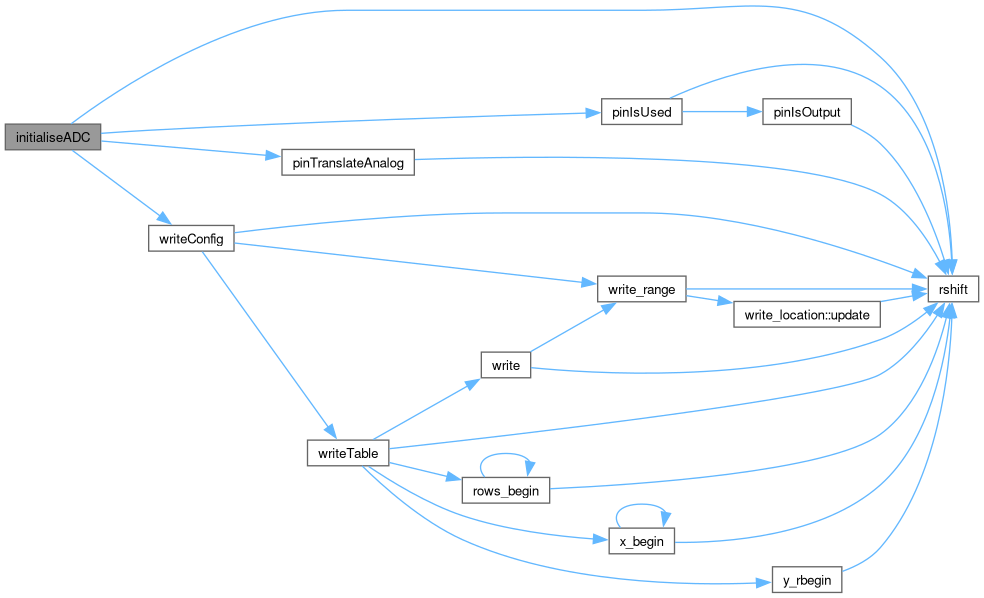
◆ initialiseADC()
Init all ADC conversions by setting resolutions, etc.
◆ initialiseCLT()
Initial reading of the coolant sensor, primarily to make sure the priming pulsewidth is correct.
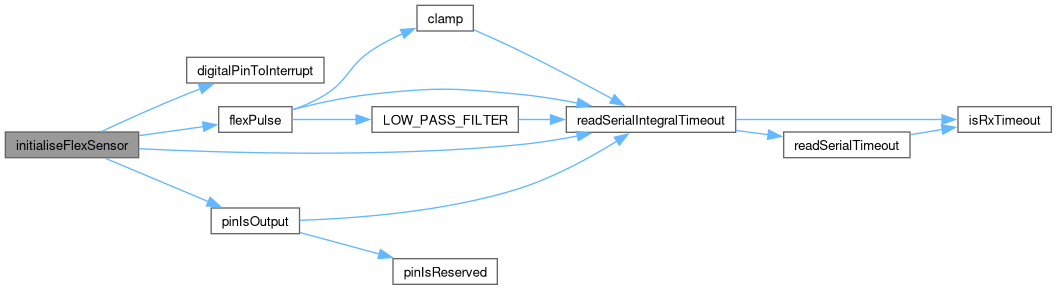
◆ initialiseFlexSensor()
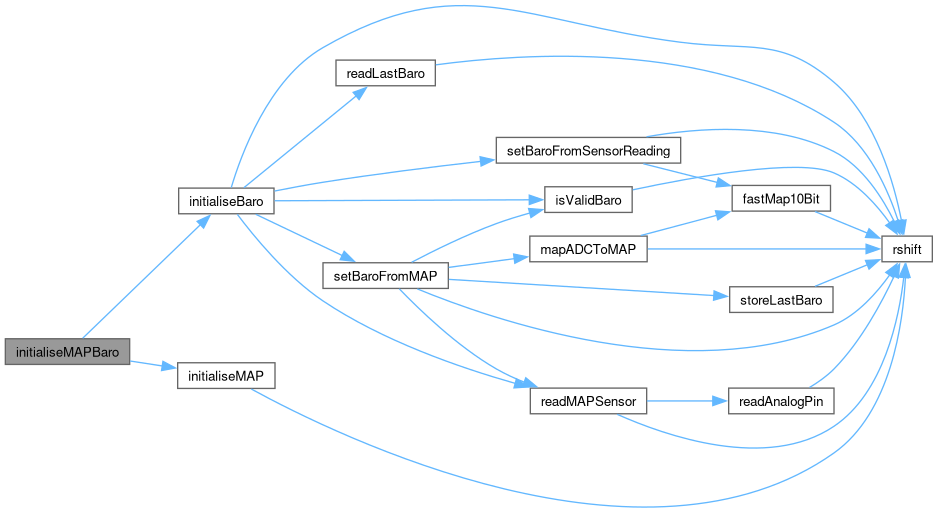
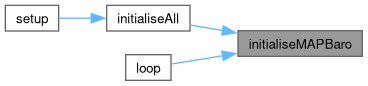
◆ initialiseMAPBaro()
Initialize the MAP calculation & Baro values.
◆ initialiseTPS()
Initial reading of the TPS sensor, primarily to detect flood clear state.
◆ knockPulse()
◆ readAuxanalog()
◆ readAuxdigital()
◆ readPolledSensors()
| void readPolledSensors |
( |
byte |
loopTimer | ) |
|
Read the sensors that are polled at every loop. This includes the TPS, MAP, CLT, IAT and O2 sensors.
◆ resetMAPcycleAndEvent()
◆ vssGetPulseGap()
Returns the VSS pulse gap for a given history point.
- Parameters
-
| historyIndex | The gap number that is wanted. EG: historyIndex = 0 = Latest entry historyIndex = 1 = 2nd entry entry |
◆ vssPulse()
The ISR function for VSS pulses.
◆ cltCalibrationTable
◆ flexCounter
◆ flexPulseWidth
◆ iatCalibrationTable
◆ o2CalibrationTable
◆ statusSensors